
Development of a scalable lightweight manipulator for ergonomic, mechanical surface removal from wall surfaces, especially of nuclear facilities, taking into account automation options (ELMO)
- Contact:
- Funding:
Federal Ministry for Economy and Energy
- Partner:
Hochschule für Technik, Wirtschaft und Gestaltung Konstanz, Fakultät Maschinenbau
- Startdate:
01.03.2021
- Enddate:
31.12.2023
The surface treatment of wall surfaces is a complex task in both conventional and nuclear applications. Whether cable slots or the thin-layer removal of coatings or concrete or brick or plaster structures over large areas, work here is often tedious, costly and time-consuming.
In conventional and nuclear facilities, the necessary work on wall surfaces is carried out either by hand-guided machines or by heavy equipment with appropriate tool interfaces. Both are questionable in terms of ergonomics as well as effectiveness, flexibility and occupational safety.
The aim of the research project is therefore to develop a scalable lightweight manipulator for ergonomic, mechanical surface removal from wall surfaces of nuclear facilities, which can also be used in conventional construction. The first demonstrator is to be tested in test series under laboratory conditions for its suitability for the intended tasks, adapted if necessary and ideally finally validated.
The demand in the nuclear sector is very high, both nationally and internationally, as more and more nuclear facilities worldwide will be dismantled in the next few years. In particular, the fact that several German nuclear power plants will start dismantling work at the same time as a result of the nuclear phase-out calls for more effective processing of wall surfaces. In addition to the application in the dismantling of nuclear facilities, this development can also be used in the conventional field, for example in the removal of materials containing pollutants (asbestos, PCB).
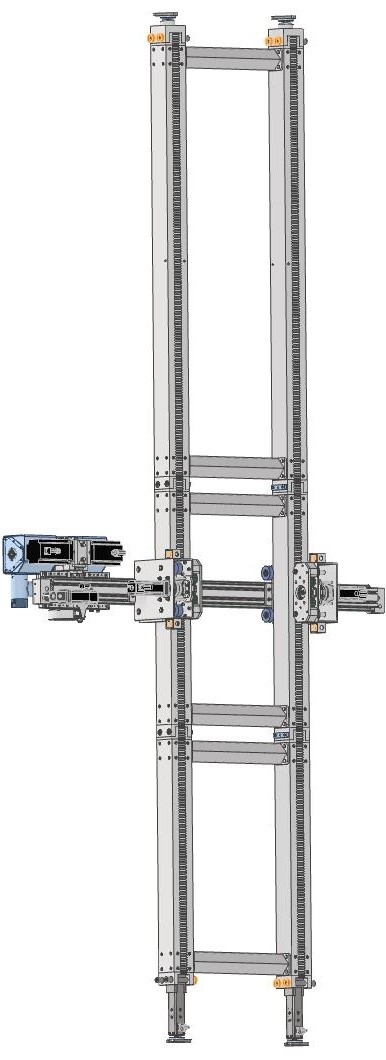
the lightweight manipulator
@WIMAG GmbH, 2023

in the KIT-TMB test rig
@WIMAG GmbH, 2024